
自动驾驶(150分)
传感器(客观打分、共计10分)
传感器是自动驾驶辅助功能的硬件基础,作为智能机汽车,这是最基础也是必须拥有的硬件标准,目前主流的解决方案是微波雷达、毫米波雷达、高清摄像头的组合方案,只要是铺设了自动驾驶能力的智能汽车一般都有一定数量的相关传感器配备,至于激光雷达目前还未大规模商业化,但是考虑到对恶劣天气、远距离的识别能力,激光雷达的小型化、隐层化仍然极具前景。

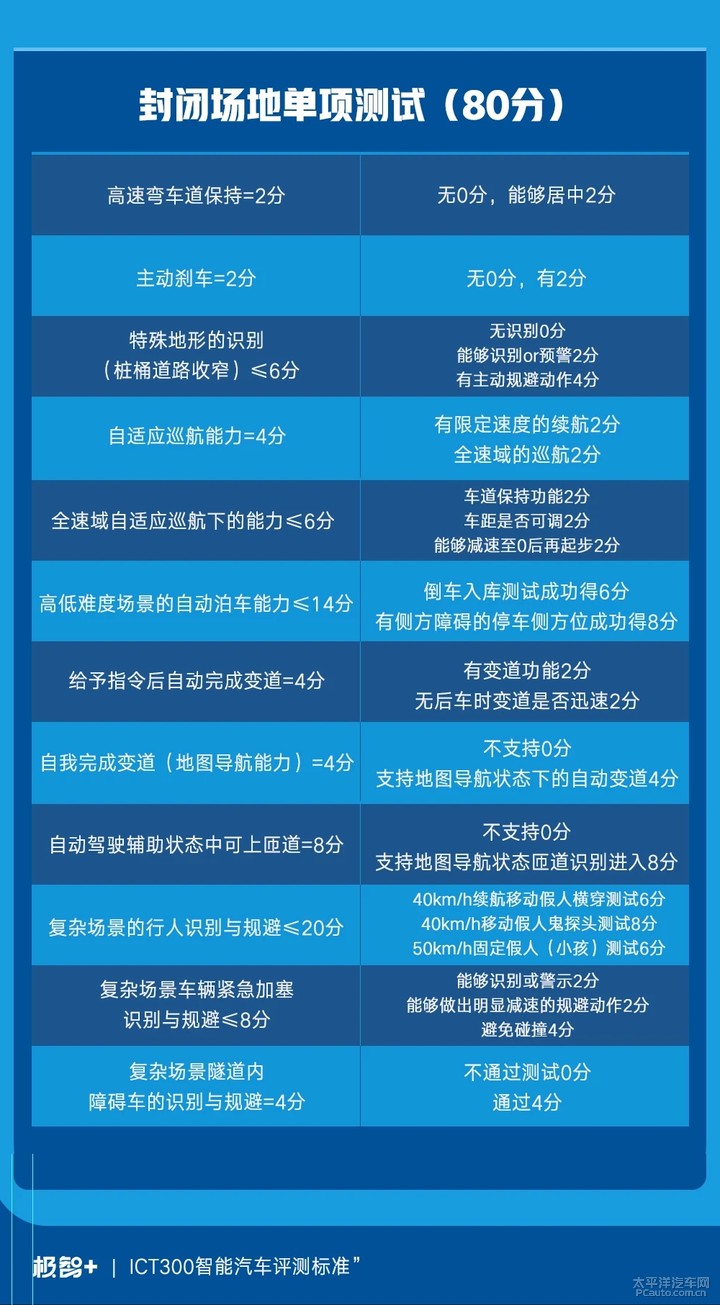
可实现功能(客观打分、共计80分)
对于可量化的功能,我们将整个标准占比最大的80分拆分成若干项目,因为自动驾驶可实现功能具有广泛且统一的分级标准,看一看我们的项目,既有基于L2级别的基本辅助功能(大约占1/4分值),也有基于L2.5的进阶辅助功能(大约占1/4分值),这二者都是“被动式”辅助驾驶,也是目前汽车中最常见的辅助驾驶功能。
另外占比较大的部分需要基于智能汽车主动识别、自我判断的辅助驾驶,这部分目前能做到的车型寥寥无几,体现了完全自动驾驶的雏形,想要拿到这部分的分数要更难一些。
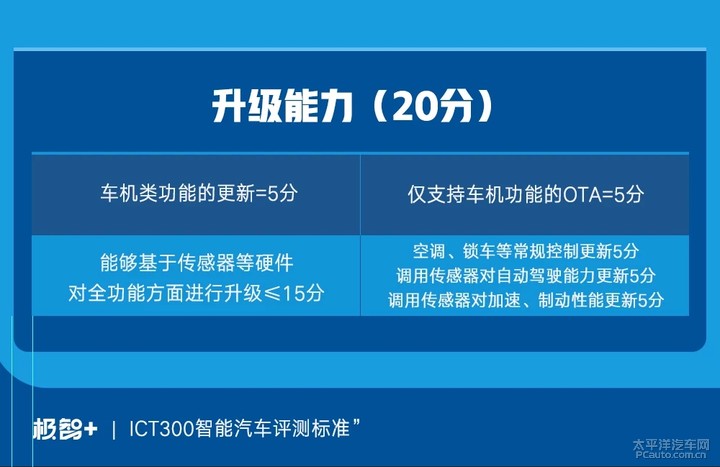
升级能力(客观打分、共计20分)
这里说的升级能力,其实就是汽车智能化的重要标签之一“OTA”,“OTA”甚至可以看作是简单粗暴的智能汽车评判标准,一般的OTA只能针对中控屏、仪表的显示及子功能进行更新,而真正的智能汽车的OTA能够基于底层,触及整车的传感器。能够对车的加速制动性能、自动驾驶能力等进行深层的性能提升。
自动驾驶主观感受(主观打分、共计40分)
这一部分是基于实测环境下对自动驾驶辅助能力进行评分,其中自适应巡航、自动泊车这两项功能相对基础,完全自动驾驶辅助及新奇功能(自动驾驶辅助进阶)对现有自动驾驶能力要求极高,后两者目前量产车型有且仅有特斯拉能够做到。

智能座舱(100分)
屏幕效果(共计10分)
屏幕评分主要包含4个项目,分别是:1.尺寸、2.显示细腻程度/分辨率、3.可视角度/亮度以及4.屏幕盖板玻璃用料,其中1和2很好理解,尺寸越大、分辨率越高,那用户观感就会越好。另外考虑到主/副驾驶都会直接操控中控屏幕,因此我们还加入了屏幕的可视角度/亮度评价项目,可视角度越大、屏幕亮度越高,在强光环境下人眼更容易识别屏幕内容。最后考虑到好的屏幕盖板玻璃可以减少指纹、划痕的出现,因此第4部分也加入了该评分体系当中。

车机性能(共计45分)
车机屏幕是人与车载智能系统最直接的交互界面,因此车机性能评分占据了智能座舱评分体系的一大部分。车机性能最先考虑的是流畅性,其次是易用性与UI交互设计,流畅性很好理解,越流畅自然越好,而好的易用性与UI交互设计能大大降低用户学习成本。此外,我们在车机功能丰富程度上还分两个维度进行评价,分别是中控以及仪表屏幕。

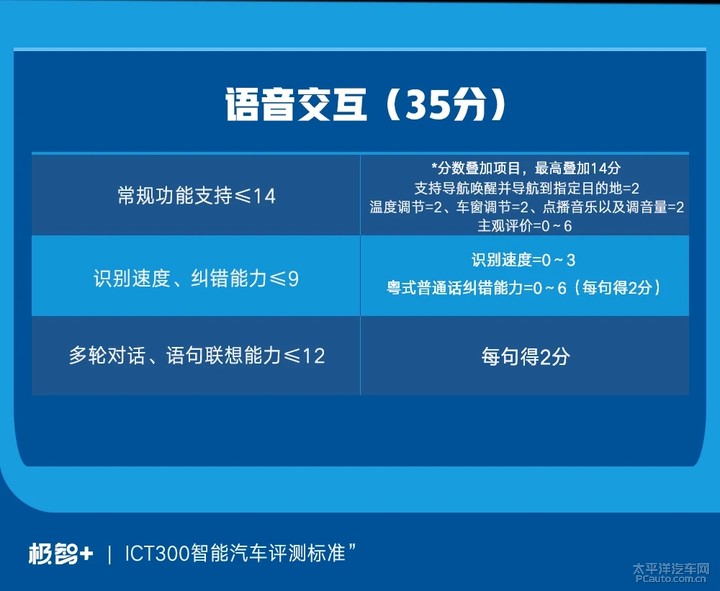
语音交互(共计35分)
随着语音技术的迭代更新,车载语音系统已经成为了智能座舱不可或缺的东西,在语音交互评分体系当中,我们细分了3个项目,首先是常规的功能实现,其次是语音系统的识别速度、纠错能力等等。最后加入的多轮对话、语音理解能力测试能很好地反映出语音系统是否做到真正的智能化。
智能化进阶需求(共计10分)
这一部分,使我们针对基础的智能化标准,进行更高要求的冗余项目,这些项目对车企的品牌调性、研发实力、人文关怀、产品定位进行一些软性要求,打分标准就是基于目前智能汽车的平均水平进行评分,属于智能化细分出来的进阶需求

性能测试(50分)
0-100km/h加速测试(客观打分,共计10分)
性能是汽车永恒的追求,0-100km/h加速时间是汽车评测当中最常见的测量数据之一,反映了汽车加速表现。通过测算0-100km/h的所需的最快时间,在一定程度上代表了车辆的动力表现。通过P-BOX专业测试仪器,采用GPS定位数据精准测算每台车的0-100km/h加速成绩。

100-0km/h制动测试(客观打分,共计10分)
制动能力对于汽车安全至关重要,在汽车评测当中,常常采用100-0km/h的制动距离作为评定指标之一,制动成绩与制动系统、轮胎以及路面等因素有关。在我们的评测标准当中,100-0km/h的制动同样采用实测的方式,通过P-BOX专业测试仪器得出准确可代表制动能力的刹车距离。

18米蛇形绕桩(主观打分,共计10分)
每个桩桶之间间距为18米,并且尽可能将车速维持在60km/h,并尽可能贴近桩桶,以流畅的节奏通过各个桩桶。18米蛇形绕桩主要涉及车身姿态和转向手感两个维度进行主观评价。由太平洋汽车专业评测编辑进行驾驶,结合车辆的具体表现,对照评分细则进行打分。

麋鹿测试(客观打分,共计10分)
采用ISO3888-2(目前较通用的麋鹿测试标准)进行场地设定;为了更加接近一般的驾驶情况,在麋鹿测试当中,我们采用打开默认电子系统状态(不手动关闭ESP等),尽可能还原日常用车情况;动能回收采用最低挡位(如有),尽可能减少影响成绩的因素。

噪音测试(客观打分,共计10分)
采用分贝仪对五项环境进行噪音测算,“环境噪音与怠速状态的差”在一定程度反映了车辆在静止状态下的噪音隔绝能力;如油电混合或增程式混动等涉及多工况动力系统,为了保证统一可比性,均采用噪音最低的工况进行对比。

备注
1、智能化定义主观、庞杂,我们重点针对的是对消费者有意义且实用的智能化体验。
2、整个测试标准自动驾驶能力占比分数较高,这是对未来智能汽车最终目标“无人驾驶”愿景的基本体现。其中汽车主动识别、自我判断的辅助驾驶能力分值占比不低,体现了完全自动驾驶的雏形,目前仅有特斯拉能够在这类项目拿到一定分数,而冗余出一定的分值,是因为我们希望这个标准能够坚持1~2年,这样就能对一个阶段的汽车智能化进行横向对比。





